
Forschung
Forschungsprojekte am Institut für Mess-, Steuerungs- und Regelungstechnik
Aktuelle Projekte
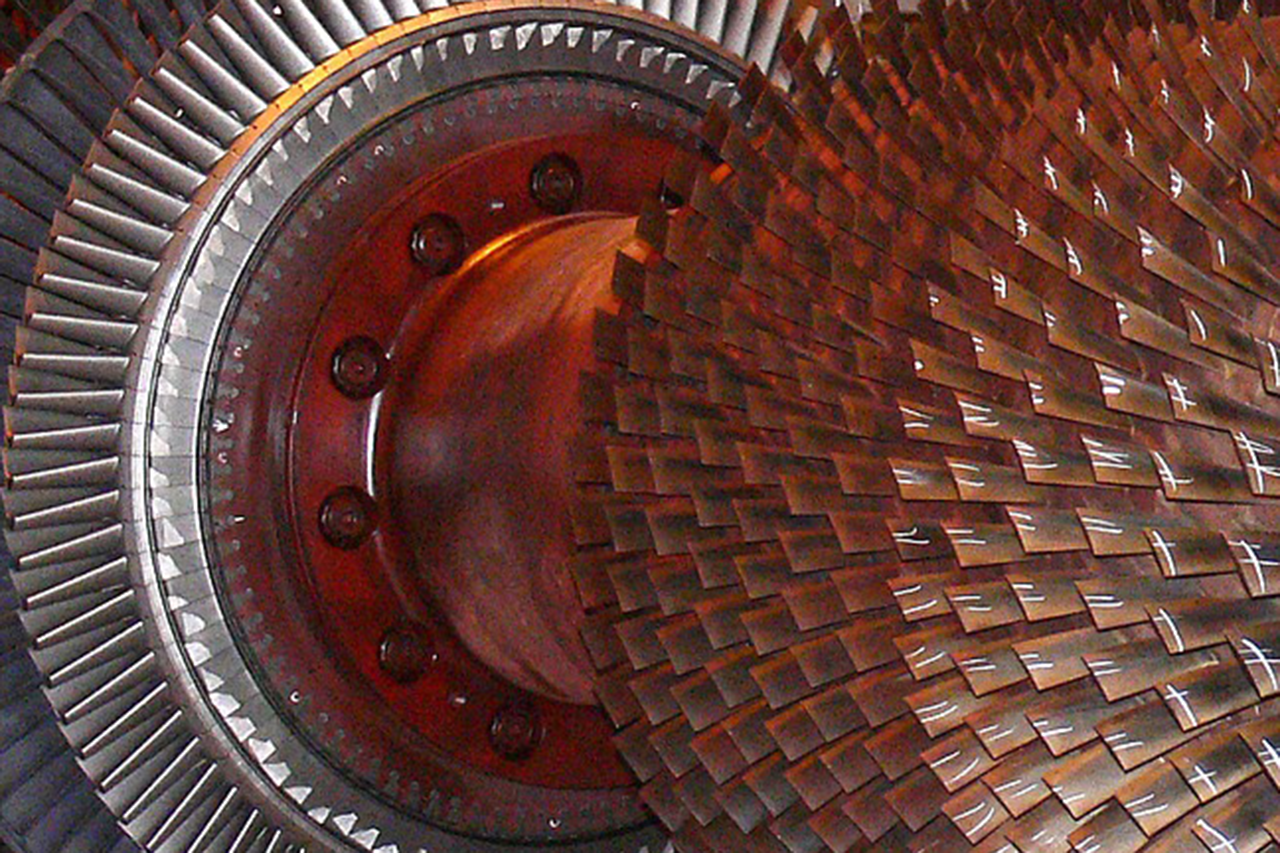
KITurbo
KI-getriebene Technologien zur Generierung angelernter und laufzeitbeschleunigter Digitaler Zwillinge sowie zur Klassifikation von Betriebs- und Fehlerzuständen im Lebenszyklus industrieller Verdichter- und Turbinensysteme
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Das Projekt adressiert zentrale Herausforderungen der Prozessindustrie wie steigende Komplexität, Fachkräftemangel und Wissensverlust durch die Weiterentwicklung des bestehenden Frameworks für Digitalen Zwillinge (DT) von AviComp. Im Fokus steht der Einsatz KI-gestützter Methoden zur Unterstützung von Überwachung, Optimierung, Fehlerdiagnose und effizienteren Modellbildung von Verdichter- und Turbinensystemen. Das FTZ-Teilprojekt entwickelt dafür hybride Modellansätze zur teilautomatisierten Generierung des DT, beschleunigten Simulation und KI-basierten Klassifikation von Fehlerzuständen.
Förderung: Zentrales Innovationsprogramm Mittelstand (ZIM)
Projektpartner: AviCompControls GmbH
Projektlaufzeit: 06/2025-01/2028
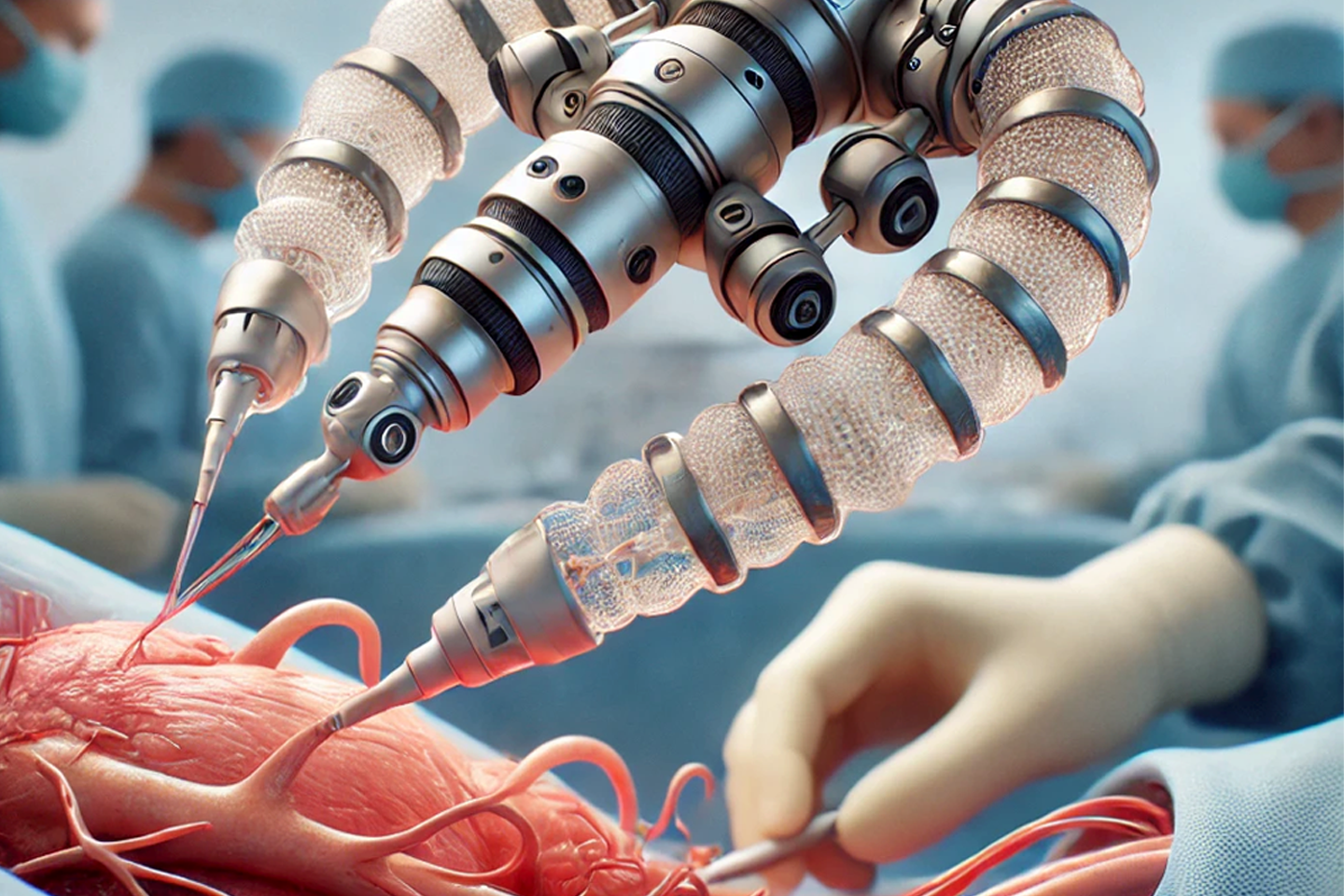
SoKoRoMed
Soft- und Kontinuums-Robotik für medizinische Anwendungen
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Das Vorhaben zielt auf die Etablierung definierter Prozessketten für die Herstellung patienten- bzw. anwendungsspezifischer weicher Endeffektoren ab. Dazu werden neue Werkstoffe, geeignete Berechnungsverfahren und eine angepasste 3D-Drucktechnik entwickelt. Die Soft- und Kontinuums-Roboter (SKR) werden im Projekt konzipiert und in Kombination mit konventioneller Medizin- und Robotertechnik in einem klinischen Gesamtdemonstrator für spezifische Interventionen zur Anwendung gebracht. Über die Definition von Standards zur System- und Funktionsbeschreibung soll die klinische Translation erleichtert werden.
Förderung: Sächsische Aufbaubank - Förderbank (SAB), kofinanziert von der Europäischen Union
Projektpartner: Innovation Center Computer Assisted Surgery (ICCAS) der Universität Leipzig
Projektlaufzeit: 09/2024 - 10/2026

HyProS
TP I Spillover-basiertes Sensorkonzept zur Wasserstoffkonzentrationsmessung in Erdgas
♢ Projekt | Prof. Dr.-Ing. Andreas Hebestreit (em.)
Das Verbundvorhaben beinhaltet die Entwicklung neuer Sensoren für die Wahrung der Sicherheit und der Beurteilung der Qualität von Grünem Wasserstoff. Die drei wesentlichen Messaufgaben umfassen die Bestimmung von Wasserstoff (TP I) im Erdgas und anderen Prozessmedien, (TP II) bei Drücken bis 100 bar und (TP III) in sauerstoffhaltigen Gasen und Luft. Die zu entwickelnde Messtechnik ist unabdingbar für die sichere und flächendeckende Verbreitung von Grünem Wasserstoff in der HYPOS- Modellregion.
Förderung: Bundesministerium für Bildung und Forschung (HYPOS)
Projektlaufzeit: 05/2017 - 10/2020

siBUS
Sicheres, intelligentes Bewegungsunterstützungssystem zur Treppenüberwindung – Validierung des technisch-wirtschaftlichen Potenzials und Umsetzungsvorbereitung
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Das sichere, intelligente Bewegungsunterstützungssystem (siBUS) hilft Senioren in häuslicher Umgebung bei der Überwindung von Treppen. Im Rahmen der SAB-Validierungsförderung soll es nun validiert und für einen Markttransfer vorbereitet werden.
Förderung: Validierungsförderung des Freistaats Sachsen
Projektlaufzeit: 04/2021 – 09/2022
SmartTurbo
Digitale Technologien für die modellgestützte Überwachung, Wartung und Modernisierung von Verdichter- und Turbinenanlagen
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Automatisierungssysteme für verfahrenstechnische Anlagen werden immer komplexer, müssen immer höhere Anforderungen an Qualität und Sicherheit gewährleisten und unterliegen einem globalen dynamischen Wettbewerb. Zur Beherrschung der steigenden Anforderungen hat sich im Zuge der industriellen Digitalisierung und der zunehmenden Vernetzung von Anlagen das Konzept des Digitalen Zwillings als digitales Abbild der realen Anlage etabliert.
Förderung: Zentrales Innovationsprogramm Mittelstand
Projektlaufzeit: 1/2020 - 2/2022
KISEC
KI-Sicherheitssystem für 7-Achs-Roboter
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Ziel des Projektes ist die Entwicklung eines Sicherheitssystems, welches den Betrieb eines Industrieroboters außerhalb klassischer Roboterzellen absichert und Bewegungsfreiheit im Arbeitsraum erlaubt. Kollisionen mit Personen oder Gegenständen sollen so verhindert werden.
Förderung: Europäischer Fonds für regionale Entwicklung (EFRE)
Projektlaufzeit: 2019 - 2021
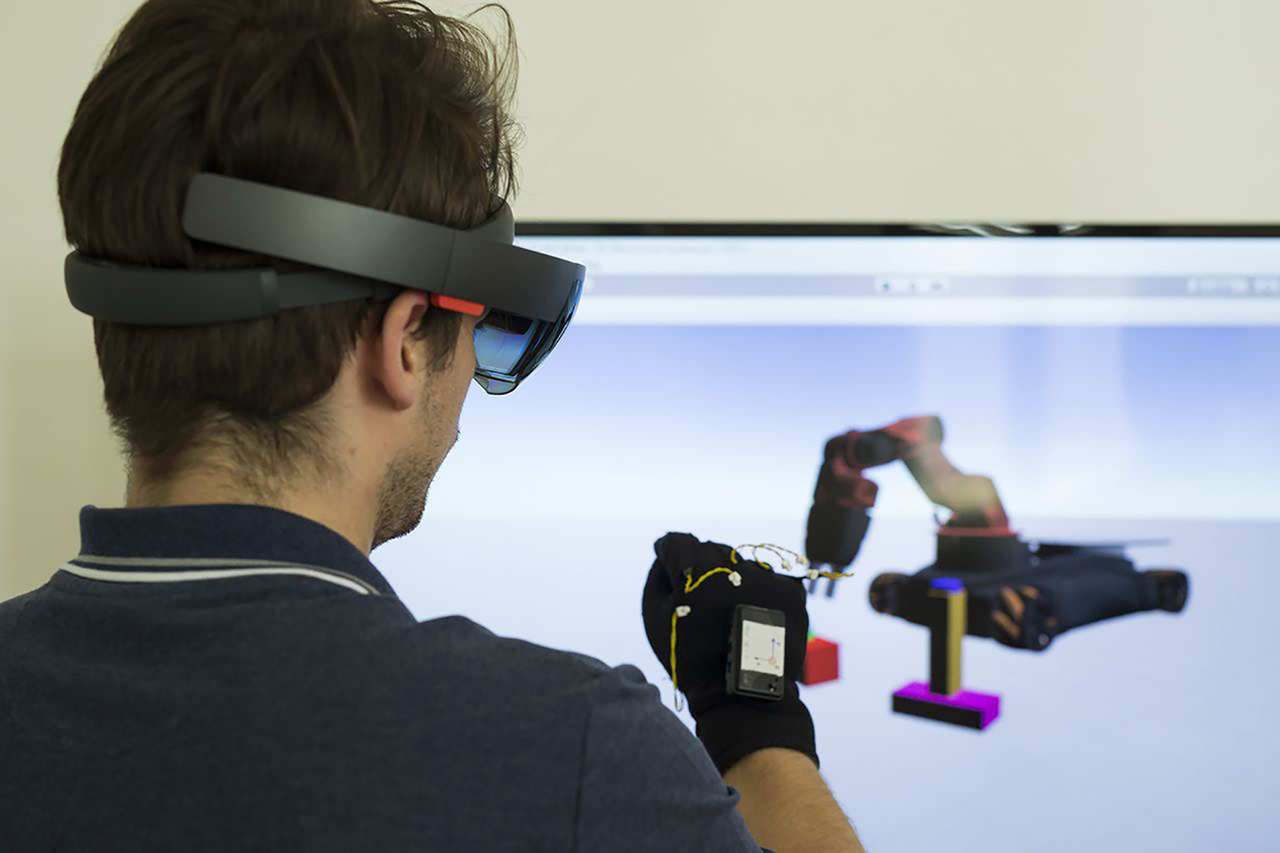
AugBot
Unterstützung von MRI mithilfe von Augmented Reality Brillen
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Die Mensch-Roboter-Interaktion (MRI) ist ein wichtiger Bestandteil der Digitalisierung und Flexibilisierung der modernen industriellen Produktion. Projektziel ist es, durch den Einsatz von Augmented-Reality-(AR)-Brillen die MRI nutzerfreundlicher und sicherer zu gestalten. Es soll ein System entwickelt werden, welches mit Hilfe von AR-Brillen die MRI erleichtert.
Förderung: Zentrales Innovationsprogramm Mittelstand (ZIM)
Projektlaufzeit: 2018 - 2020

MALEVIK
Steuerungssystem zum intuitiven Bedienen von Kraftverstärkungsrobotern auf Basis maschinell gelernter virtueller Kraftfelder
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Im Projekt MALEVIK soll ein System für leicht bedienbare roboterbasierte Kraftverstärkungssysteme entwickelt werden. Kernstück des Systems ist die Führung des Bedieners durch ein tunnelförmiges virtuelles Kraftfeld um eine optimale Bewegungsbahn.
Förderung: ZIM
Projektlaufzeit: 2015 - 2017
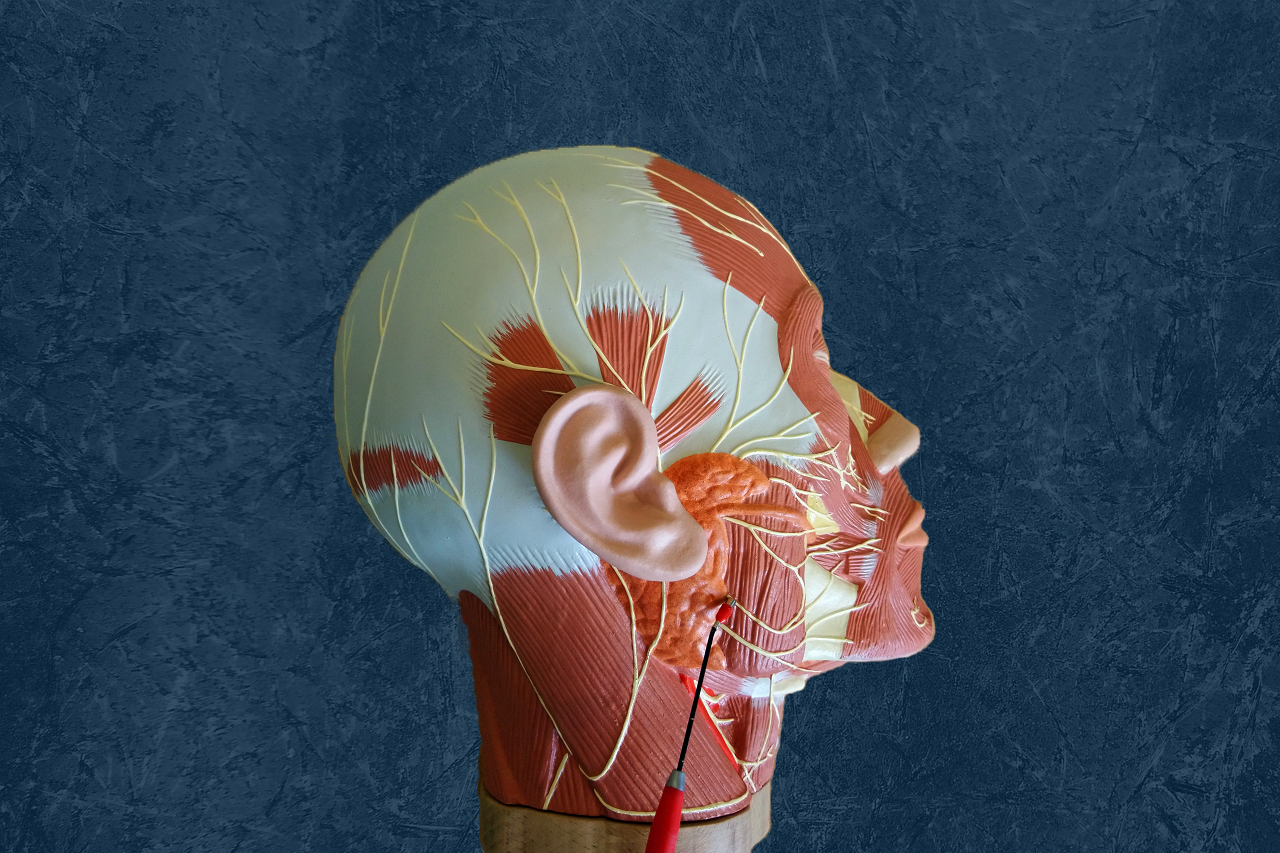
SimION
Entwicklung eines Simulationssystems für das Intra Operative Neuromonitoring in der HNO-Chirurgie
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel
Ziel ist die prototypische Entwicklung eines Simulationssystems („Patientenmodell“) für das sog. intraoperative Neuromonitoring (IONM) anhand eines Beispielszenarios aus der HNO-Chirurgie. Die Anwendung des IONM soll mit dem zu entwickelnden Simulationssystem realistisch, kostengünstig und reproduzierbar geübt werden können.
Förderung: BMBF
Projektlaufzeit: 2015 - 2019
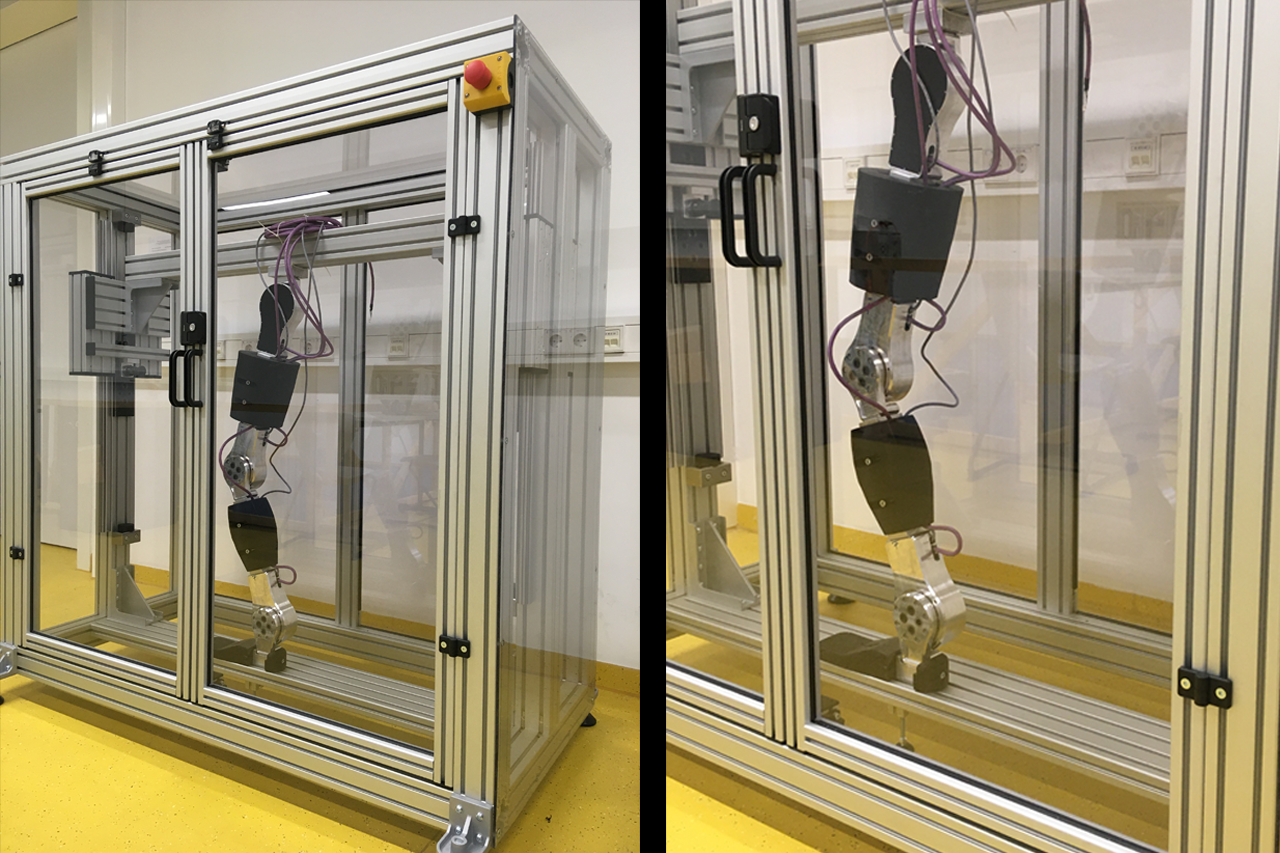
Bewegungsunterstützungssysteme für den Einsatz in Rehabilitation und Pflege älterer Menschen (BuS)
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel, Prof. Dr.-Ing. Johannes Zentner
Ziel: Entwicklung eines interdisziplinären Konzepts zur funktionellen Verifikation von Bewegungsunterstützungssystemen sowie konstruktive Umsetzung und Aufbau des Konzeptes.
Ergebnisse: Aufbau und Konstruktion eines „mechatronischen Beins“ als Prüfstand
Förderung: SAB, SMWK
Projektlaufzeit: 08/2019 - 12/2019

Entwicklung minimal aktuierter, intelligenter Systeme zur intuitiven Bewegungsunterstützung
♢ Projekt | Prof. Dr.-Ing. Jens Jäkel, Prof. Dr.-Ing. Johannes Zentner
Ziel: Im Projekt sollen exoskelettale Bewegungsunterstützungssysteme partizipativ entwickelt werden, welche Senioren beim Bewältigen alltäglicher Hürden, wie dem Treppensteigen, helfen. Durch Ermittlung des biomechanischen Unterstützungsbedarfes und der simulationsgestützten Konzeptuntersuchung sollen erste Demonstratoren aufgebaut werden.
Förderung: Europäischer Sozialfond (ESF)
Projektlaufzeit: 10/2016 - 07/2019
Weitere Projekte | Prof. Dr.-Ing. Jens Jäkel
- DemoS | Systemlösungen zur Gestaltung des Demograpischen Wandels
Prof. Dr.-Ing. Jens Jäkel, 08/2016-07/2019 - CanTurbo | Innovativer Entwicklungsprozess von Steuerungssoftware im Bereich rotierender Maschinen - beispielhafte Umsetzung für modellbasierte Verdichterregelungen
Prof. Dr.-Ing. Jens Jäkel, 01/2014-11/2016 - SimVIP | Simulationswerkzeug für die Virtuelle Inbetriebnahme in der Prozessindustrie
Dirk Lippik, Prof. Dr.-Ing. Jens Jäkel, 05/2016-12/2016 - HiLAS-VT| Hardware-in-the-Loop-Simulationen für den Entwurf von Automatisierungssystemen für Verdichter- und Turbinenanlagen – Methodik, Werkzeuge und prototypische Applikation
Prof. Dr.-Ing. Jens Jäkel, 03/2013-04/2016 - METEORIT | MEnsch‐TEchnik‐Kooperation in der ArbeitsORganisation durch Intelligente Technologien, Teilthema Gefahrlose Aktorik/Kraftverstärkung
Prof. Dr.-Ing Detlef Riemer/ Prof. Dr.-Ing. Jens Jäkel, 06/2013-03/2015 - PascAL | Patientensimulationsmodelle für die chirurgische Ausbildung und Lehre. Intelligente, sensorintegrierte Phantomsysteme der zweiten Generation, Teilthema Intraoperatives Neuromonitoring an simuliertem Nervengewebe
Prof. Dr. Werner Korb/ Prof. Dr.-Ing. Jens Jäkel, 05/2012-10/2014 - Flight Cam System | Entwicklung eines Hubschrauber-Kamerasystems mit erweiterten Flugeigenschaften basierend auf bestehenden Modullösungen für die Produktion von "Full HD"-Videoaufnahmen
Prof. Dr.-Ing. Jens Jäkel, 05/2012-10/2014 - HiLTurbo | HiL-Simlulationssystem für den Entwurf und Test von verfahrenstechnische Automatisierungssystemen am Beispiel von Verdichter- und Turbinenanlagen
Prof. Dr.-Ing. Jens Jäkel,11/2011-12/2013 - Modellbasierte Regelung von Turboverdichtern
Prof. Dr.-Ing. Jens Jäkel, 04/2013-12/2013 - Innovative Regelung von Turboverdichtern
Prof. Dr.-Ing. Jens Jäkel, 05/2012-12/2012 - Spurschätzung für mehrgliedrige Straßenfahrzeuge
Prof. Dr.-Ing. Jens Jäkel, 04/2009-10/2012 - EMONS | Entwicklung einer optoelektronischen, noninvasiven, mobilen Sehhilfe für schwer Sehbehinderte
Prof. Dr.-Ing. Jens Jäkel, 01/2009-12/2011 - Demosaicking von verrauschten Daten eines Bayer-Bildsensors
Prof. Dr.-Ing. Jens Jäkel, 08/2009-10/2011 - PROTurbo | Entwicklung einer Messeinrichtung zur Früherkennung von aerodynamischen Instabilitäten in Radial-Verdichtersystemen
Prof. Dr.-Ing. Jens Jäkel, Prof. Dr.-Ing. Hendrik Richter, 10/2009-09/2011
