
Meteorit
Kurzbeschreibung:
Ein interdisziplinäres Team aus 10 Nachwuchswissenschaftlern widmet sich dem Thema der kooperativen Automation im Produktionsprozess. In diesem Projekt forschen Absolventen aus den Bereichen Maschinenbau, Elektrotechnik und Informationstechnik, den Wirtschaftswissenschaften und der Psychologie.
Im Fachgebiet Mechatronik & Systemtheorie wird das Thema gefahrlose Aktorik/Kraftverstärkung bearbeitet.
Dabei werden folgende Punkte bearbeitet:
- Aufbau eines Kraftverstärkungssystems mit Hilfe einer seriellen Kinematik
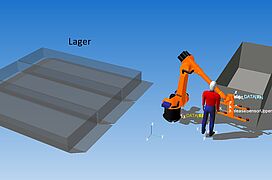
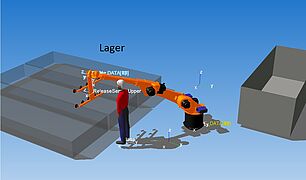
Um Überbelastungen der Mitarbeiter in der industriellen Fertigung zu vermeiden, werden Handlingsgeräte eingesetzt, welche das Heben von schweren Lasten unterstützen. Eine Möglichkeit diese Systeme umzusetzen, ist das Ausrüsten einer seriellen Roboterkinematik mit einem 6D-Kraft-/Momentsensors. Dieser wird an die Spitze des Roboters montiert. Greift der Anwender diesen Sensor, so kann er den Roboter beliebig positionieren.
Mit dieser Technik kann der Roboter durch den Mitarbeiter zu einem Lager geführt werden, in welchen vom Roboter ein Werkstück gegriffen wird. Dieses kann daraufhin vom Mitarbeiter ohne großen Kraftaufwand zu dem Ort geführt werden, an dem das Werkstück montiert werden soll, s. Abbildung.
Projektleitung: Prof. Dr.-Ing. Detlef Riemer
Projektbetreuung am Institut MSR: Prof. Dr.-Ing. Jens Jäkel
Projektmitarbeiter am Institut MSR: M.Sc. Florian Müller
Laufzeit: 06/2013 – 12/2014
Förderer: ESF
